東莞市中制自動(dòng)化設(shè)備有限公司??
Dongguan CNAUTO Automation Co., LTD.
18929475867
Dongguan CNAUTO Automation Co., LTD.
18929475867
Power Supply
Latest recommendation
作者:點(diǎn)膠機(jī)廠家 日期:2019-12-09 09:54 瀏覽:
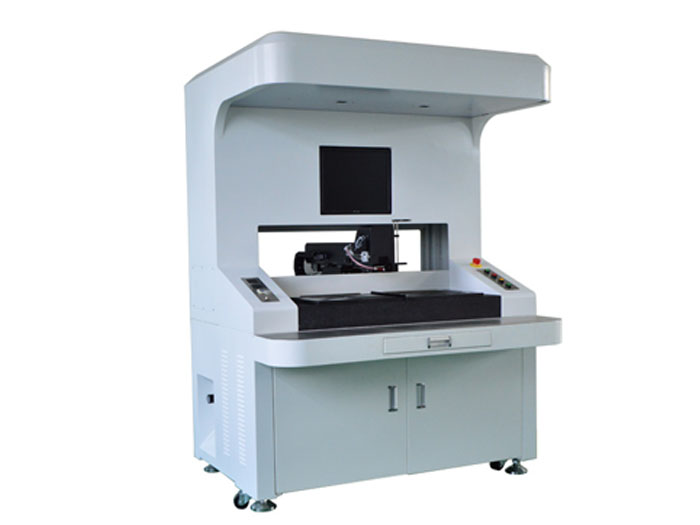
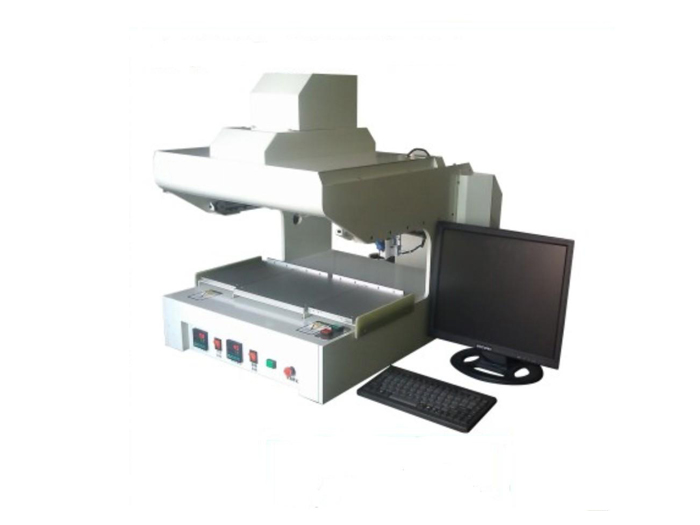
中制自動(dòng)化設(shè)備有限公司全力為用戶(hù)打造各種實(shí)用性強(qiáng)的高速全自動(dòng)點(diǎn)膠機(jī) 大型高速點(diǎn)膠機(jī) 落地式高速點(diǎn)膠機(jī)

